18
May
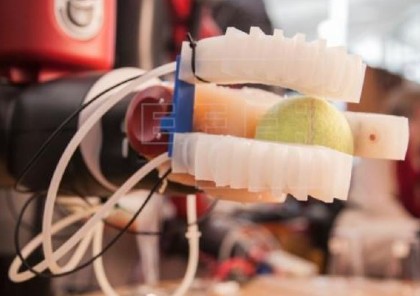
Soft robotics, solving problems by emulating nature, press article
Report on EFE’s website including interview to Concha Monje.


Report on EFE’s website including interview to Concha Monje.

Carlos Balaguer was iinterviewed in the framework of the agreement between CEA, chaired by him, and the mathematical society.

Starting on October 1st, 2020, WeLASER aims to avoid the use of chemical products in the removal of weeds in agriculture by developing a new robotic system that uses a laser source for destroying weeds (cordis).
In the context of the world growing population and higher needs of reducing the uses of pesticides and fertilizers, WeLASER seeks more sustainable management. Mechanical solutions contribute to deteriorate soil properties, harm beneficial soil organisms and provide poor results for intra-row weeding. However, the WeLASER solution focuses on non-chemical weed management based on applying lethal

Today a meeting was held with the coordinators and various members of the Madrid digital innovation hub DIH bio. It was attended by some of the members of RoboCity2030 who have interests in areas of health. The participants from our consortium were: Carlos Balaguer, Miguel Ángel Salichs, Luis Moreno, Alberto Jardón, Eduardo Silles, Elena García, Cecilia García, Alberto Brunete. In this first meeting of scientific-technical content, the various lines of research of the groups have been shown with the aim of identifying lines of collaboration between DIH bio and our

A new EU project (in which Robotics Lab UC3M is participating) has been recently launched. The aim of the EU-funded ALMA project is to leverage AML properties to develop a new generation of interactive, human-centric machine learning systems. These systems are expected to reduce bias and prevent discrimination, remember what they know when they are taught something new, facilitate trust and reliability and integrate complex ethical constraints into human–artificial intelligence systems. Furthermore, they are expected to promote distributed, collaborative learning.
RoboCity2030 consortium has been extended by the program de Ayudas para la Realización de Programas de Actividades de I+D entre Grupos de Investigacion de la Comunidad de Madrid en Tecnologías co-funded by Structural Funds from the European Union. The program acronym is RoboCity2030-DIH-CM and the official code is S2018/NMT-4331.

Recently the Spanish Chapter of the IEEE Intelligent Transportation Systems Society (ITSS) has presented its awards. In them Antonio Artuñedo (CSIC) has obtained the prize to the best doctoral thesis in the area. Javier del Egido (RobeSafe-UAH) won the first prize for the best end-of-degree work and Juan Felipe Arango (RobeSafe-UAH) was a finalist in this category.

Marsi Bionics (Marsi) is an SME founded in 2013 as a spin-off from the Center for Automation and Robotics (CAR), a joint center of the Polytechnic University of Madrid (UPM) and the Spanish National Research Council (CSIC).
Since 2019 the CSIC is part of its shareholders. It is recognized as a Technology Based Company (TBC) with a high impact on the development of disruptive technologies for the health sector.
Its activity is focused on the development of lower limb exoskeletons for medical and industrial applications.
Recently the company has launched an equity crowdfunding
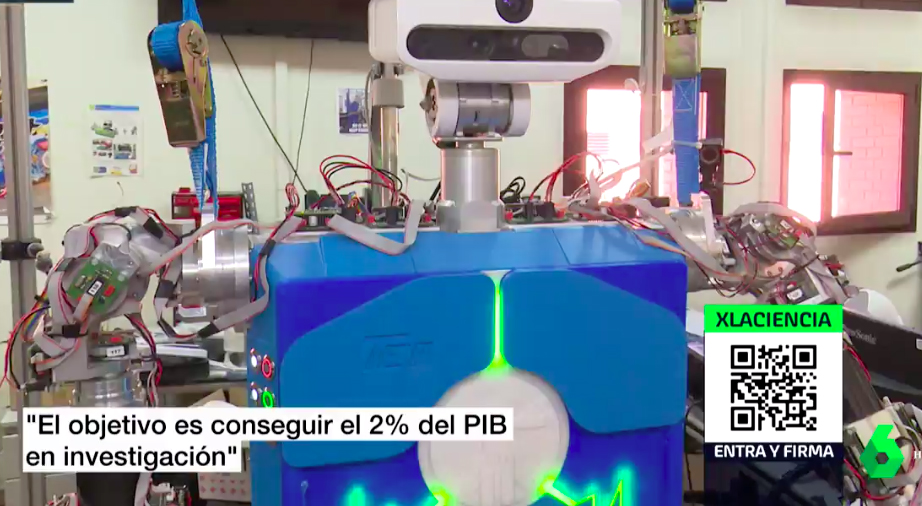
Last week the whole Robotics Lab was featured on a report on La Sexta TV channel.
You can see it here.

The 21st edition of the International Workshop of Physical Agents (WAF2020) will be held on 19 and 20 November at the University of Alcalá. This is an international forum focusing on research into artificial intelligence (AI) techniques in control applications and interaction with physical agents (mobile robots, vehicles, manipulators, etc.). It is an event sponsored by RoboCity2030.
The conference presents a wide range of research challenges in the fields of software agents, multi-agent systems, human-robot interaction, mobile robots, social robots, cooperating robots, autonomous vehicles, machine and deep learning, perception, location, mapping
Copyright © 2015 - Robocity2030.
Recent Comments